La conducción inteligente-autónoma está a la vuelta de la esquina, pero al tratarse de Jaguar Land Rover tenemos que pensar en la legitimidad de la armadora británica en la creación de vehículos todoterreno. ¡Suscríbete...
La conducción inteligente-autónoma está a la vuelta de la esquina, pero al tratarse de Jaguar Land Rover tenemos que pensar en la legitimidad de la armadora británica en la creación de vehículos todoterreno.

–La misión será crear vehículos dotados de conducción autónoma en cualquier superficie
–La tecnología se basará en la generación de sensores ultrasónicos, que serán los ojos de los todoterreno autónomos y revisarán las condiciones del terreno hasta con cinco metros de anticipación
–Se contará con modificación de velocidad de acuerdo a la visualización de baches, agua estancada etcétera
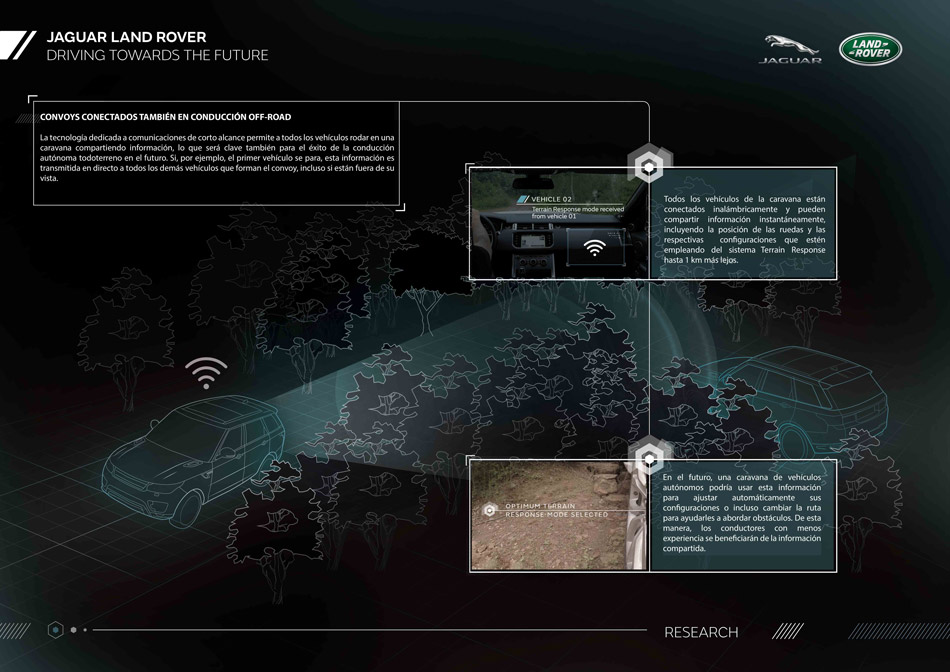
–Ejercicios de demostración tipo convoy, en el que el primer vehículo informa de las condiciones y así respectivamente

El nombre del proyecto es Autonomous All Terrain Driving, de conducción todoterreno autónoma, y ha recibido una cantidad fuerte de inversión en libras para generar una conducción segura e inteligente en cualquier condición meteorológica.
“Nuestra investigación sobre todoterreno autónomo no consiste sólo en conseguir que un vehículo sin conductor pueda circular en carretera o en situaciones extremas todoterreno, consiste en ayudar tanto al conductor como al coche autónomo a circular con de la forma más segura sobre todo tipo de terreno o circunstancia de conducción»: Tony Harper.
Tecnologías:
La investigación en Identificación de Superficie y Sensores de Trayecto en 3D (Surface Identification And 3D Path Sesnsing) combina cámara, ultrasonido, radar y sensores LIDAR (para ofrecer al vehículo una visión de 360 grados) con sensores tan avanzados que permiten determinar las características de la superficie, hasta la anchura de un neumático, incluso si llueve o nieva, para planificar la ruta. El Overhead Clearance Assist controla alturas y distancias con tecnología estereocópica para analizar el trayecto por delante e incluyo detectar obstáculos elevados. Terrain-Based Speed Adaption, que controla la velocidad de acuerdo a la superficie, utiliza cámaras para detectar los caminos ondulantes e irregularidades.